
🤖 不同路径 II
📝 题目描述
一个机器人位于一个m x n网格obstacleGrid的左上角(起点在下图中标记为Start)。机器人每次只能向下或者向右移动一步。机器人试图到达网格的右下角(终点在下图中标记为Finish)。
现在考虑网格中有障碍物,障碍物的数量count区间为count >= 0。网格中的障碍物和空位置分别用数字1和0表示。

请你计算出机器人从起点到达终点共有多少条不同的路径。需要说明的是,1 x 1的无障碍网格的路径数取值为1,且障碍物存在于起点或终点的网格的路径数取值为0。
📋 代码模版
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
}
}function uniquePathsWithObstacles(obstacleGrid: number[][]): number {
}💡 提示
为 或
🚀 示例
示例一
obstacleGrid输入为[[0,0,0],[0,1,0],[0,0,0]],这是一个3 x 3的网格,示意图如下。

在该网格上,机器人从起点到达终点的路径共有2条。
- 向右 → 向右 → 向下 → 向下

- 向下→ 向下 → 向右 → 向右

示例二
obstacleGrid输入为[[0,0,1,0,0],[0,1,0,0,0],[0,0,0,1,0],[0,1,0,0,0]],这是一个4 x 5的网格,示意图如下。
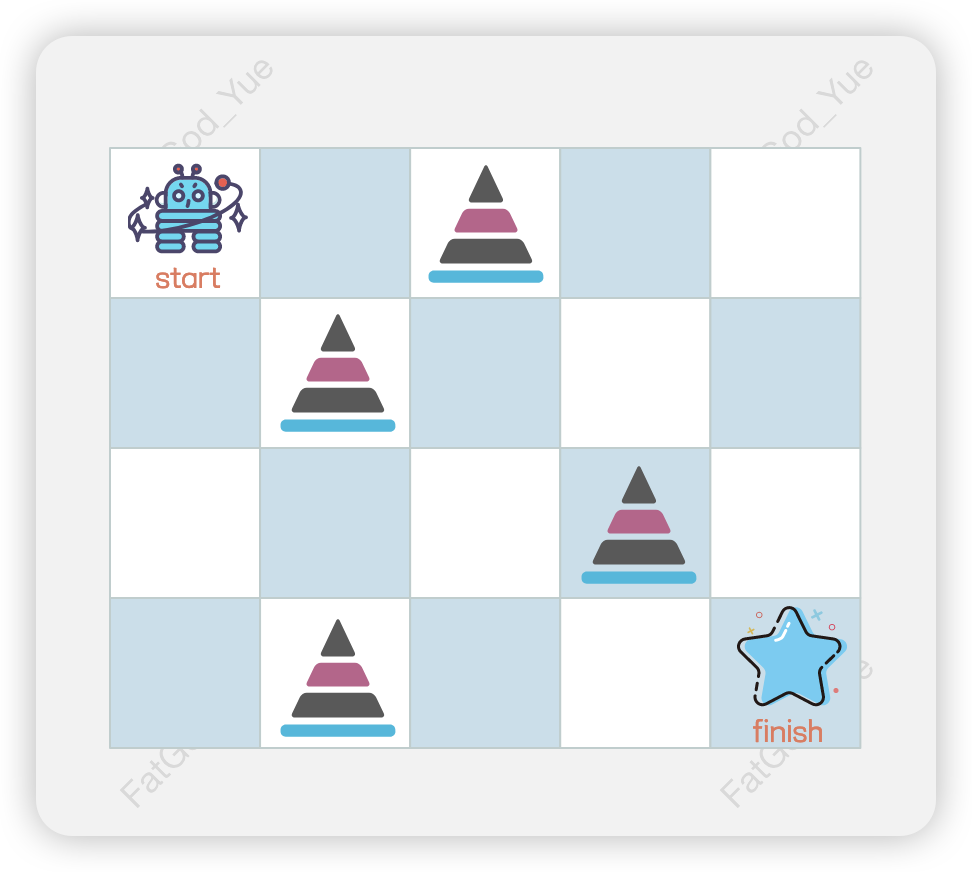
在该网格上,机器人从起点到达终点的路径只有1条。
- 向下→ 向下 → 向右 → 向右 → 向下 → 向右 → 向右

示例三
obstacleGrid输入为[[0,1,0,0,0,0,0,0,0],[1,0,0,0,0,0,0,0,0],[0,0,0,0,0,0,0,0,0],[0,0,0,0,0,0,0,0,0],[0,0,0,0,0,0,0,0,0],[0,0,0,0,0,0,0,0,0]],这是一个6 x 9的网格,示意图如下。
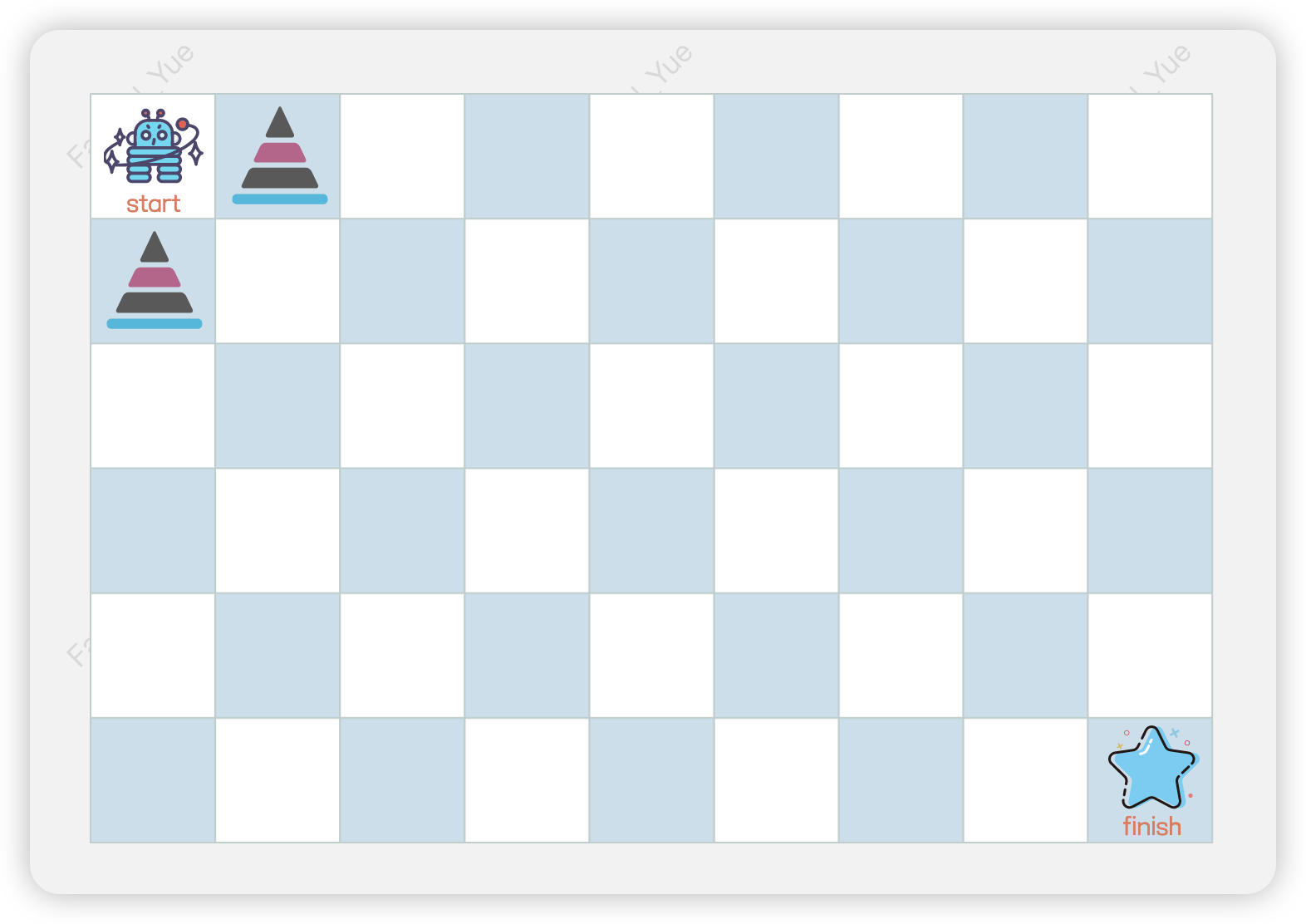
在该网格上,机器人从起点到达终点的路径不存在,即0条。
🖊️ 题解
本题是题目不同路径的进阶版,因此在解决这道题之前,强烈建议先处理题目不同路径。两者唯一的区别为:本题的网格中可能存在障碍物,而题目不同路径的网格中肯定没有障碍物。下面我们来探讨下障碍物对机器人在网格中移动产生的影响。
在题目不同路径中,当计算到达当前格子的路径总数时,我们会先计算到达其上边和左边的格子的路径总数。但在本题中,如果这两个相龄的格子中出现障碍物,障碍物将阻挡机器人向下或向右移动。因此,当计算的格子中出现障碍物时,其路径总数直接返回

在题目不同路径中,边界条件为网格第一行和第一列上的格子,它们的路径总数为
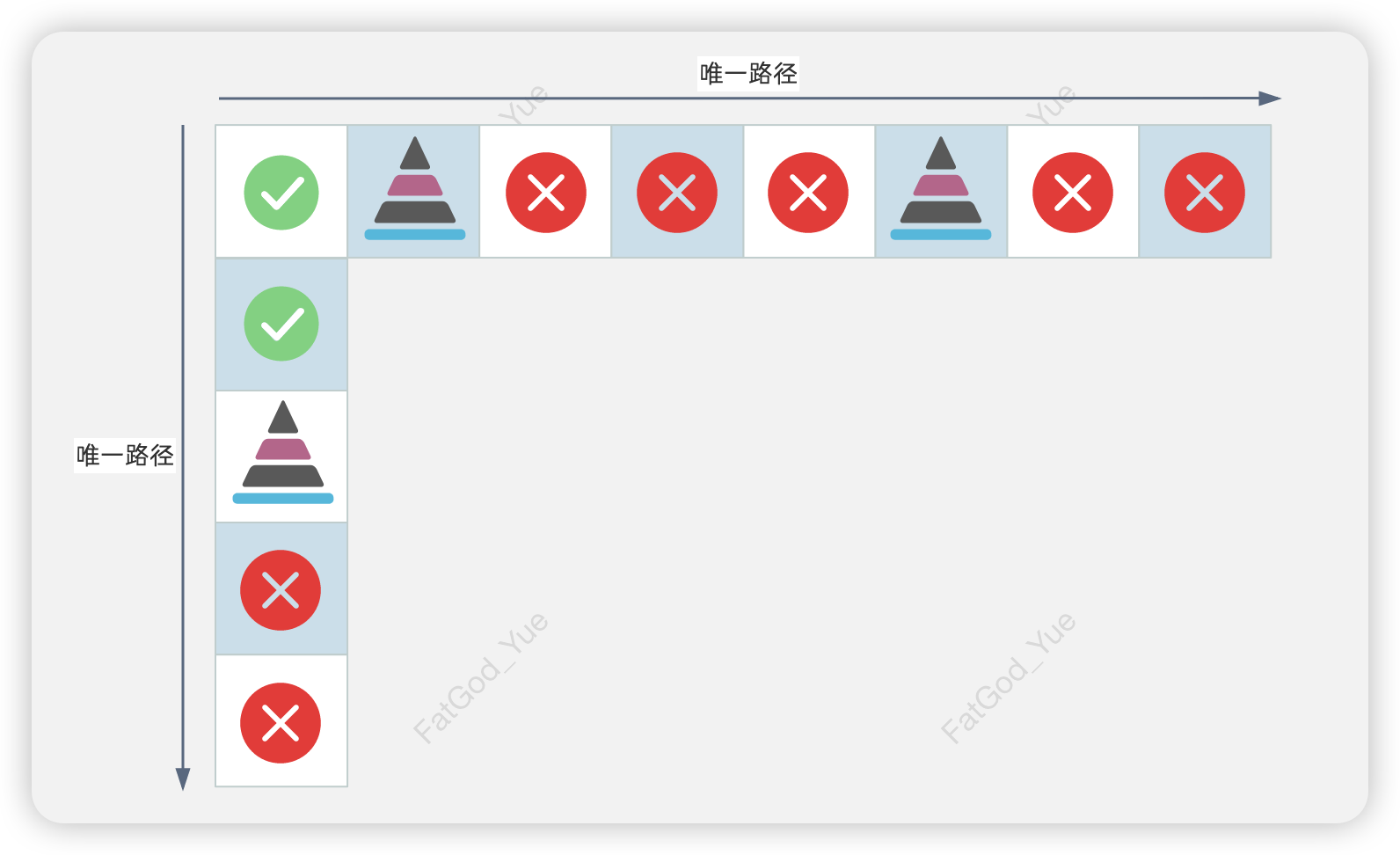
需要说明的是,在本题中,网格的行与列的索引从0开始,即最上面一行索引为0,最左边一列索引为0。同时,重设
记忆化搜索
本题中使用的记忆化深度优先遍历dfs的递归公式与题目不同路径相同,即
class Solution {
private final static int NOT_CALC = -1;
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m = obstacleGrid.length - 1;
int n = obstacleGrid[0].length - 1;
int[][] memory = new int[m + 1][n + 1];
for (int[] arr : memory) {
Arrays.fill(arr, NOT_CALC);
}
memory[0][0] = obstacleGrid[0][0] ^ 1;
for (int i = 1; i <= n; i++) {
memory[0][i] = obstacleGrid[0][i] == 1 ? 0 : memory[0][i - 1];
}
for (int i = 1; i <= m; i++) {
memory[i][0] = obstacleGrid[i][0] == 1 ? 0 : memory[i - 1][0];
}
return dfs(m, n, obstacleGrid, memory);
}
private int dfs(int i, int j, int[][] obstacleGrid, int[][] memory) {
if (obstacleGrid[i][j] == 1) {
return 0;
}
if (memory[i][j] != NOT_CALC) {
return memory[i][j];
}
return memory[i][j] = dfs(i - 1, j, obstacleGrid, memory) +
dfs(i, j - 1, obstacleGrid, memory);
}
}function uniquePathsWithObstacles(obstacleGrid: number[][]): number {
const m = obstacleGrid.length - 1, n = obstacleGrid[0].length - 1;
const memory: number[][] = Array.from({ length: m + 1 }, () => []);
memory[0][0] = obstacleGrid[0][0] ^ 1;
for (let i = 1; i <= n; i++) {
memory[0][i] = obstacleGrid[0][i] == 1 ? 0 : memory[0][i - 1];
}
for (let i = 1; i <= m; i++) {
memory[i][0] = obstacleGrid[i][0] == 1 ? 0 : memory[i - 1][0];
}
const dfs = (i: number, j: number): number => {
if (obstacleGrid[i][j] == 1) {
return 0;
}
if (memory[i][j] !== undefined) {
return memory[i][j];
}
return memory[i][j] = dfs(i - 1, j) + dfs(i, j - 1);
}
return dfs(m, n);
}动态规划
普通版
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m = obstacleGrid.length - 1;
int n = obstacleGrid[0].length - 1;
int[][] dp = new int[m + 1][n + 1];
dp[0][0] = obstacleGrid[0][0] ^ 1;
for (int i = 1; i <= n; i++) {
dp[0][i] = obstacleGrid[0][i] == 1 ? 0 : dp[0][i - 1];
}
for (int i = 1; i <= m; i++) {
dp[i][0] = obstacleGrid[i][0] == 1 ? 0 : dp[i - 1][0];
}
for (int i = 1; i <= m; i++) {
for (int j = 1; j <= n; j++) {
dp[i][j] = obstacleGrid[i][j] == 1 ? 0 : (dp[i - 1][j] + dp[i][j - 1]);
}
}
return dp[m][n];
}
}function uniquePathsWithObstacles(obstacleGrid: number[][]): number {
const m = obstacleGrid.length - 1, n = obstacleGrid[0].length - 1;
const dp: number[][] = Array.from({ length: m + 1 }, () => []);
dp[0][0] = obstacleGrid[0][0] ^ 1;
for (let i = 1; i <= n; i++) {
dp[0][i] = obstacleGrid[0][i] == 1 ? 0 : dp[0][i - 1];
}
for (let i = 1; i <= m; i++) {
dp[i][0] = obstacleGrid[i][0] == 1 ? 0 : dp[i - 1][0];
}
for (let i = 1; i <= m; i++) {
for (let j = 1; j <= n; j++) {
dp[i][j] = obstacleGrid[i][j] == 1 ? 0 : dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m][n];
}状态压缩版
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m = obstacleGrid.length - 1;
int n = obstacleGrid[0].length - 1;
int[] cur = new int[n + 1];
cur[0] = obstacleGrid[0][0] ^ 1;
for (int i = 0; i <= m; i++) {
for (int j = 0; j <= n; j++) {
if (obstacleGrid[i][j] == 1) {
cur[j] = 0;
} else {
cur[j] += j - 1 >= 0 ? cur[j - 1] : 0;
}
}
}
return cur[n];
}
}function uniquePathsWithObstacles(obstacleGrid: number[][]): number {
const m = obstacleGrid.length - 1, n = obstacleGrid[0].length - 1;
const cur: number[] = Array(n + 1).fill(0);
cur[0] = obstacleGrid[0][0] ^ 1;
for (let i = 0; i <= m; i++) {
for (let j = 0; j <= n; j++) {
if (obstacleGrid[i][j] == 1) {
cur[j] = 0;
} else {
cur[j] += j - 1 >= 0 ? cur[j - 1] : 0;
}
}
}
return cur[n];
}💭 复杂度分析
基于记忆化搜索的解决方案的复杂度分析如下。
- 时间复杂度:
。 - 空间复杂度:
。
基于动态规划的最优(状态压缩)解决方案的复杂度分析如下。
- 时间复杂度:
。 - 空间复杂度:
。